|
#include
#include
/* This sample code demonstrates the normal use of a TinyGPS object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 3(rx) and 4(tx).
*/
TinyGPS gps;
SoftwareSerial nss(3, 4);
static void gpsdump(TinyGPS &gps);
static bool feedgps();
static void print_float(float val, float invalid, int len, int prec);
static void print_int(unsigned long val, unsigned long invalid, int len);
static void print_date(TinyGPS &gps);
static void print_str(const char *str, int len);
void setup()
{
Serial.begin(115200);
nss.begin(4800);
Serial.print("Testing TinyGPS library v. ");
Serial.println(TinyGPS::library_version());
Serial.println("by Mikal Hart");
Serial.println();
Serial.print("Sizeof(gpsobject) = "); Serial.println(sizeof(TinyGPS));
Serial.println();
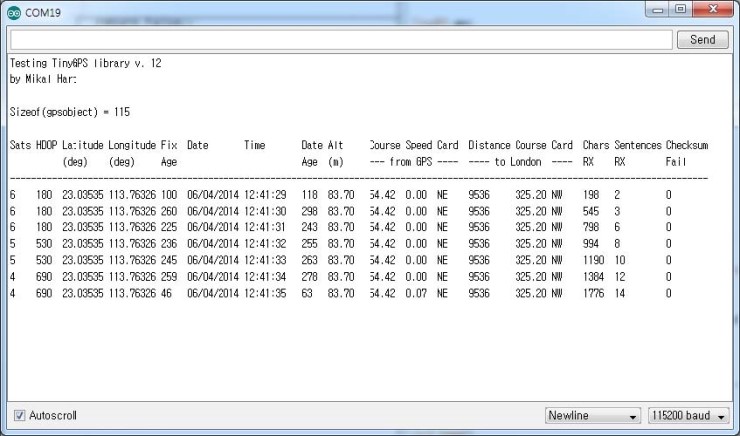
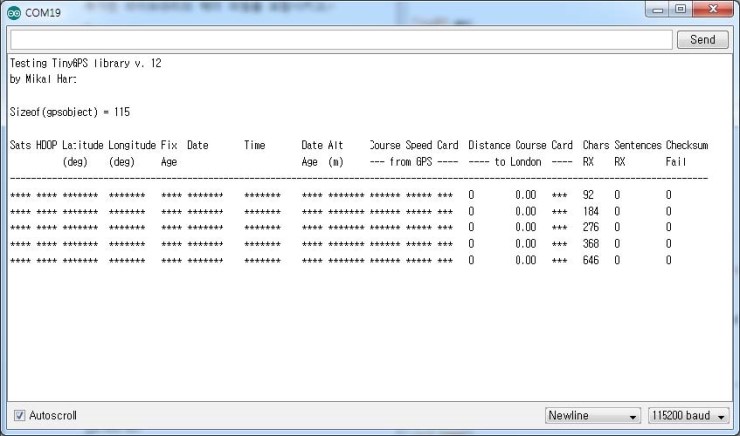
Serial.println("Sats HDOP Latitude Longitude Fix Date Time
Date Alt Course Speed Card Distance Course Card Chars
Sentences Checksum");
Serial.println(" (deg) (deg) Age Age (m) --- from GPS ---- ---- to London ---- RX RX Fail");
Serial.println("--------------------------------------------------------------------------------------------------------------------------------------");
}
void loop()
{
bool newdata = false;
unsigned long start = millis();
// Every second we print an update
while (millis() - start < 1000)
{
if (feedgps())
newdata = true;
}
gpsdump(gps);
}
static void gpsdump(TinyGPS &gps)
{
float flat, flon;
unsigned long age, date, time, chars = 0;
unsigned short sentences = 0, failed = 0;
static const float LONDON_LAT = 51.508131, LONDON_LON = -0.128002;
print_int(gps.satellites(), TinyGPS::GPS_INVALID_SATELLITES, 5);
print_int(gps.hdop(), TinyGPS::GPS_INVALID_HDOP, 5);
gps.f_get_position(&flat, &flon, &age);
print_float(flat, TinyGPS::GPS_INVALID_F_ANGLE, 9, 5);
print_float(flon, TinyGPS::GPS_INVALID_F_ANGLE, 10, 5);
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
print_date(gps);
print_float(gps.f_altitude(), TinyGPS::GPS_INVALID_F_ALTITUDE, 8, 2);
print_float(gps.f_course(), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_float(gps.f_speed_kmph(), TinyGPS::GPS_INVALID_F_SPEED, 6, 2);
print_str(gps.f_course() == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(gps.f_course()), 6);
print_int(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0UL : (unsigned long)TinyGPS::distance_between(flat, flon, LONDON_LAT, LONDON_LON) / 1000, 0xFFFFFFFF, 9);
print_float(flat == TinyGPS::GPS_INVALID_F_ANGLE ? 0.0 : TinyGPS::course_to(flat, flon, 51.508131, -0.128002), TinyGPS::GPS_INVALID_F_ANGLE, 7, 2);
print_str(flat == TinyGPS::GPS_INVALID_F_ANGLE ? "*** " : TinyGPS::cardinal(TinyGPS::course_to(flat, flon, LONDON_LAT, LONDON_LON)), 6);
gps.stats(&chars, &sentences, &failed);
print_int(chars, 0xFFFFFFFF, 6);
print_int(sentences, 0xFFFFFFFF, 10);
print_int(failed, 0xFFFFFFFF, 9);
Serial.println();
}
static void print_int(unsigned long val, unsigned long invalid, int len)
{
char sz[32];
if (val == invalid)
strcpy(sz, "*******");
else
sprintf(sz, "%ld", val);
sz[len] = 0;
for (int i=strlen(sz); i
sz[i] = ' ';
if (len > 0)
sz[len-1] = ' ';
Serial.print(sz);
feedgps();
}
static void print_float(float val, float invalid, int len, int prec)
{
char sz[32];
if (val == invalid)
{
strcpy(sz, "*******");
sz[len] = 0;
if (len > 0)
sz[len-1] = ' ';
for (int i=7; i
sz[i] = ' ';
Serial.print(sz);
}
else
{
Serial.print(val, prec);
int vi = abs((int)val);
int flen = prec + (val < 0.0 ? 2 : 1);
flen += vi >= 1000 ? 4 : vi >= 100 ? 3 : vi >= 10 ? 2 : 1;
for (int i=flen; i
Serial.print(" ");
}
feedgps();
}
static void print_date(TinyGPS &gps)
{
int year;
byte month, day, hour, minute, second, hundredths;
unsigned long age;
gps.crack_datetime(&year, &month, &day, &hour, &minute, &second, &hundredths, &age);
if (age == TinyGPS::GPS_INVALID_AGE)
Serial.print("******* ******* ");
else
{
char sz[32];
sprintf(sz, "%02d/%02d/%02d %02d:%02d:%02d ",
month, day, year, hour, minute, second);
Serial.print(sz);
}
print_int(age, TinyGPS::GPS_INVALID_AGE, 5);
feedgps();
}
static void print_str(const char *str, int len)
{
int slen = strlen(str);
for (int i=0; i
Serial.print(i
feedgps();
}
static bool feedgps()
{
while (nss.available())
{
if (gps.encode(nss.read()))
return true;
}
return false;
} | 
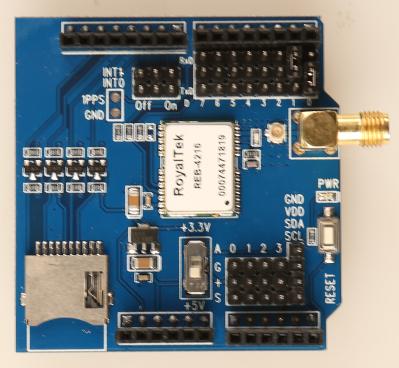
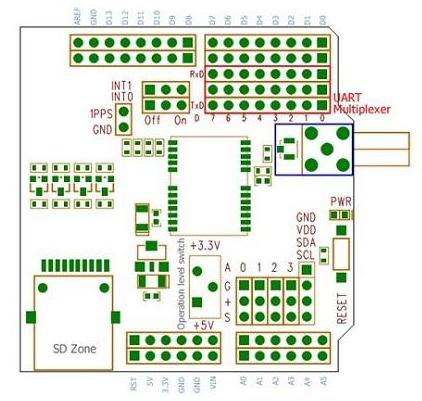
 [아두이노 응용] 3. GPS 쉴드 - 1
[아두이노 응용] 3. GPS 쉴드 - 1 ohmsa
ohmsa