15. 서보 모터
이번 강좌에서는 서보 모터 제어에 대해서 알아 보도록 한다.
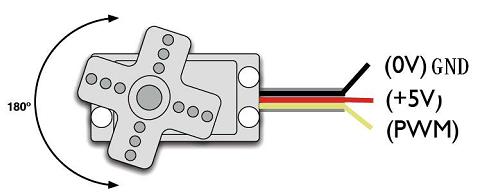
사용할 서보 모터는 아래 그림과 같은 종류이다.

간단한 사양을 정리 해 보면,
사용전압
: 4.2 ~ 6V 동작속도
: 0.3초/60도 토크 : 1.5 Kg/cm 동작온도 : 0 ~ 55℃ 무게 : 9g
서보 모터의 동작은 PWM 신호의 형태로 동작을 한다. 20ms 주기로 0.5ms ~ 2.5ms의 펄스로 신호를 주면, 0˚ ~ 180˚의
위치를 제어할 수 있다.
0.5ms--------------0도
1.0ms------------45도
1.5ms------------90도
2.0ms-----------135도
2.5ms-----------180도
아래 그림의 동작을 보면 이해가 빠를 것이다.
 <출처 : http://gongkong.gkbk.com> <출처 : http://gongkong.gkbk.com>
10비트의 PWM을 이용한다고
하면, 180˚/1024 대략 1비트당 0.18˚로
제어가 가능하다.
이번 강좌에서의 실험도 아두이노의 기본 라이브러리를 이용해서 하도록 한다. 가변저항을
이용하여, 아날로그 값을 입력 받아서 서보모터를 해당 값만큼 각도를 움직이는 실험이다.
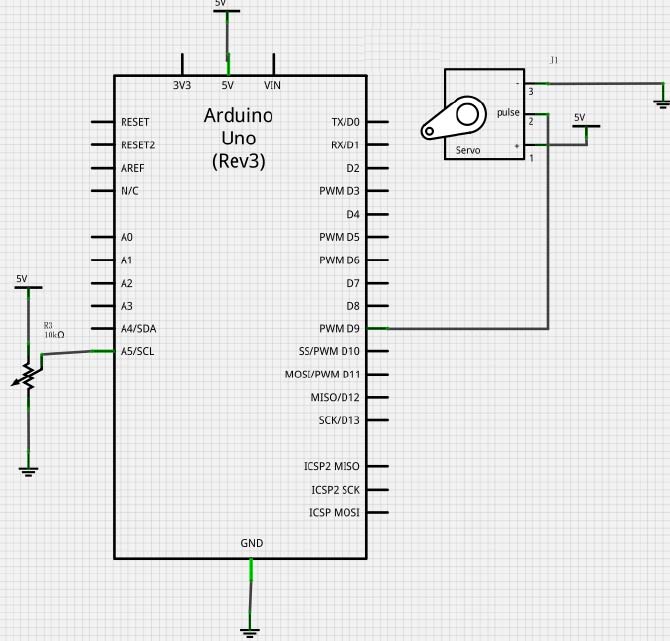
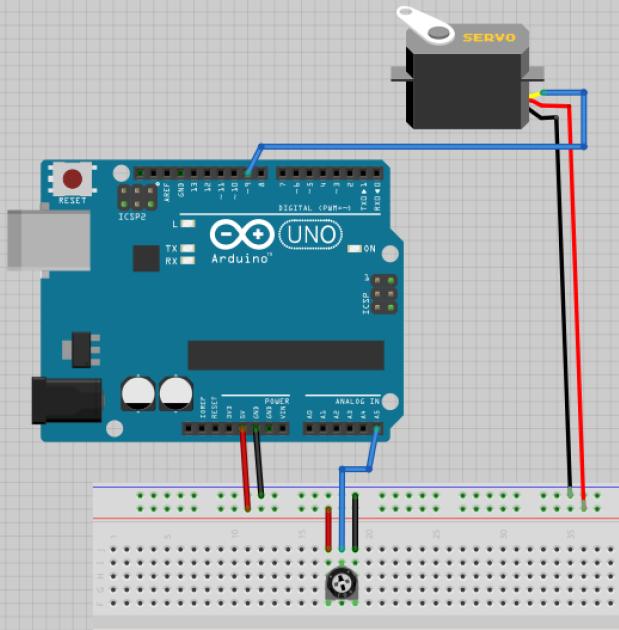
위의 회로를 참고하여, 아래와 같이 구성해 보자.
예제는 [파일]-[예제]-{Servo}-[Knob]를 이용하도록 한다.
|
// Controlling a servo position using a
potentiometer (variable resistor)
// by Michal Rinott
<http://people.interaction-ivrea.it/m.rinott>
#include
Servo myservo; // create servo object to control a servo
int potpin = 5; // analog pin used to connect the
potentiometer
int val; // variable to read the value from the
analog pin
void setup()
{
myservo.attach(9); // attaches the servo on pin 9 to the servo
object
}
void loop()
{
val = analogRead(potpin); // reads the value of the potentiometer
(value // between 0 and 1023)
val = map(val, 0, 1023, 0,
179); // scale it to use it with the servo
// (value
between 0 and 180)
myservo.write(val); // sets the servo position according to the
scaled
// value
delay(15);
// waits for the servo to get there
}
|
위 코드는 아날로그 포트5에 연결되어 있는 가변저항의 값을 읽어서, 그 값에 해당하는 만큼의 각도로 환산하여 서보모터를 동작시키게 된다.
새로 나온 내용에 대해서 알아 보도록 하자.
#include
서보 모터를 사용하기 위해
추가해야 되는 라이브러리의 헤더 파일이다.
Servo myservo;
사용자 임의의 클래스 변수를 지정한다.
myservo.attach(9);
servo.attach(pin)
pin에 서보 모터가 연결되는 핀 번호를 지정해 준다.
myservo.write(val);
servo.write(angle)
angle에 서보 모터의 각도를 지정해 준다.
0부터 180까지 지정이 가능하다.
컴파일 후에 업로드 해 보면서
동작을 이해하기 바란다
이번 강좌를 마지막으로 기초
강좌를 마치도록 한다. 다음 강좌는 응용 강좌 게시판에서 다루게 되며,
쉴드 보드 위주로 강좌를 연재하려 한다. 기초 강좌도
15강좌로 마무리 지게 되지만, 필요한 부분이 있으면 별도로 올리도록 하겠다.
|

 [아두이노] 15. 서보 모터
[아두이노] 15. 서보 모터 ohmsa
ohmsa